

的概念源于仿照人类运动的方针,但现有体系在运动高雅性和功率上仍与人类存在距离。形成这一距离的要害原因首要在于当时在运动学、动力学和驱动特性方面与人类存在必定的差异。本研讨旨在经过规划与人类特征高度类似的优化来缩小这一距离。为此,咱们构建了具体的驱动组件机电建模结构,并根据该模型对机器人驱动体系来进行多方针优化(方针函数根据前期研讨成果)。这一进程不只完成了高效能驱动体系的规划,还优化了结构部件的质量与惯性散布,使其更挨近人类。经过该规划流程开发的人形机器人米特拉(Mithra),开始测验标明其在类人运动学和动力学特性方面到达规划方针,并具有爬楼梯、深蹲和奔驰等使命所需的驱动才能。
人类运动力学经过数百万年的进化,已能在杂乱地势上完成安稳、和婉且自习惯的运动。受此启示,大多数腿式机器人经过仿照人类下肢结构规划机械腿,以习惯人类环境并促进有用交互。近年来,人形机器人已被使用于仓储物流、军事使命、救援举动和医疗辅佐等范畴。
在双足机器人拟人化腿部规划中,需在灵活性、安稳性和能效之间进行权衡。根据McGeer被迫步行机的Ranger和Denise完成了高能效运动,但献身了鲁棒性和多使命才能。而Atlas和ASIMO等机器人虽能在实在环境中展示超卓的运动才能,但其运输成本显着高于生物体系。MIT Cheetah、ATRIAS等机器人则测验经过高扭矩、可回驱的驱动体系平衡多使命才能与被迫动力学特性。但是,这些机器人的腿部结构与人类存在十分显着差异,导致其无法彻底复现人类运动的高阶特征,如关节协谐和摇摆相的腿部惯性使用。
本研讨在前期提出的矢状面拟人化腿部优化结构基础上,将其扩展至三维空间,并具体论述了该结构在新式人形机器人渠道Mithra开发中的使用。根据人类均匀数据和规范行走/奔驰轨道,界说了Mithra的尺度、关节活动度、运动学及驱动功能指标。经过仿真与试验验证了规划的有用性。
腿部运动学结构是人形机器人的中心特征。ASIMO、HUBO等机器人选用全拟人化下肢结构,一般包括3自由度髋关节、1自由度膝关节和2自由度踝关节。这种六自由度模型可以有用模仿人类下肢的首要运动形式,并便于逆运动学求解。
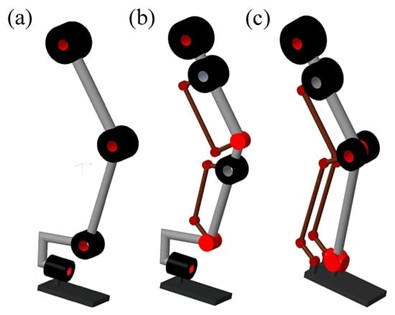
传统串行关节规划(图1a)虽简化了机械与操控,但会添加腿部惯性,影响动态功能。为下降惯性,驱动单元常经过连杆或皮带传动完成离轴安置(图1b)。WALK-MAN等机器人则选用曲柄连杆组织(图1c),经过机械增益下降驱动扭矩需求,提高腿部刚度。并联组织在踝关节的使用可逐步优化结构紧凑性。
仿生规划经过双关节驱动和张拉全体结构模仿人类肌肉骨骼体系,可下降操控带宽需求并提高能量功率。但是,多驱动协同操控的杂乱性约束了其实践使用。
电动驱动因操控简洁、能量传输高效成为干流挑选。高减速比传动体系可提高扭矩密度,但会影响环境习惯性和冲击鲁棒性。串联弹性驱动(SEA)虽改进了力操控功能,但下降了驱动带宽。
跟着无刷直流电机(BLDC)技能的开展,直接驱动概念逐步遍及。MIT Cheetah的准直接驱动(QDD)体系经过关节力操控完成了动态运动,但存在电机体积大、高速扭矩受限等问题。液压驱动虽具有高功率密度,但能效低、体系杂乱,约束了其实践使用。
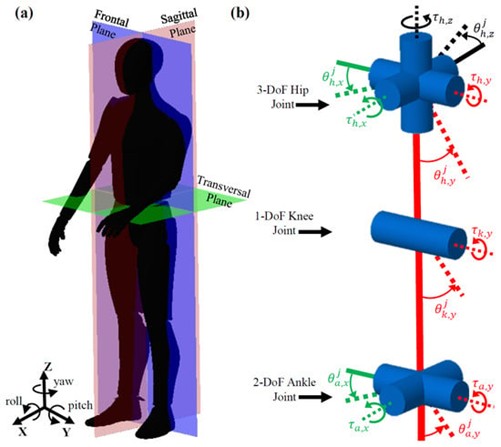
下肢选用规范六自由度装备(图2b):3自由度髋关节(偏航-滚转-俯仰次序)、1自由度膝关节和2自由度踝关节。髋关节选用同轴驱动以简化操控,膝踝关节经过连杆组织完成离轴驱动,以下降摇摆相惯性。
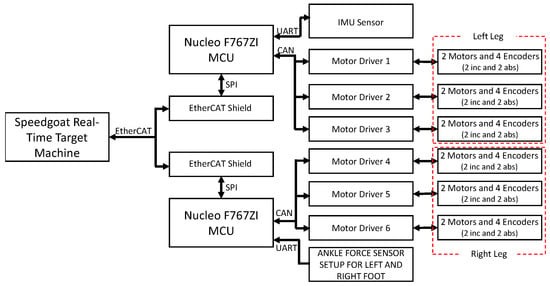
选用1kHz实时操控办理体系,经过CAN总线与电机驱动器通讯,EtherCAT衔接微操控器单元(MCU)完成多传感器数据交融。
Mithra关节活动度与人类及其他机器人比照标明,其规划有用复现了人类下肢运动规模。
与现有机器人比较,Mithra在关节扭矩和速度方面体现优异,尤其是膝关节比扭矩达4.2 Nm/kg,满意人类奔驰需求。
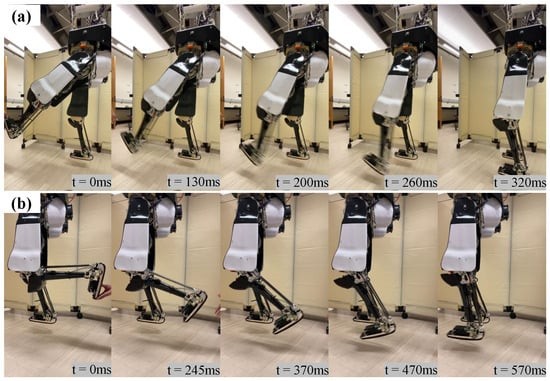
本研讨经过多方针优化结构完成了类人化人形机器人Mithra的规划,其机械结构与驱动体系在能效、动态功能和回驱性方面到达预期方针。未来作业将聚集于步态操控算法开发,验证其在杂乱环境中的运动才能,并探究其在医疗机器人范畴的使用潜力。
